圧縮機の基本について
圧縮機の基本、ヘッド計算、アンチサージコントローラー等についてまとめていきます。
Polytropic Headの計算(ASME PTC10)
遠心式圧縮機の性能曲線
典型的な性能曲線
遠心式圧縮機の性能曲線は一般的に下図のように、ヘッドvs風量で表され、効率はヘッドvs風量平面で等高線状に効率分布を持ちます。
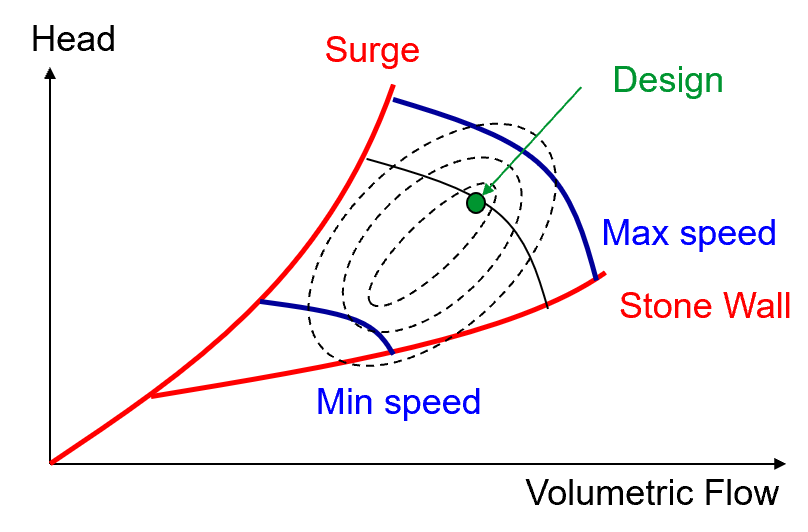
赤色のラインがサージライン、ストーンウォールラインになります。
サージラインよりも流量が低下すると、コンプレッサーが振動し始め、故障する可能性が高くなります。サージを避けるための運転については後述いたします。
ストーンウォールは下流に殆ど抵抗が無く、ヘッドがたたずに、空回りしているような状態です。特にMach数が1に近づくに従って、急激に流量が増加し、ヘッドが低下する現象が見られます。高流量で運転することで、コンプレッサーの効率が低下し、コンプレッサーにダメージを与える可能性もあります。Compressor Handbookに、ストーンウォールが何故起きるのかが詳しく説明されています。
青色のラインが安定的に運転可能な最大、最低回転数を示しています。
プロセスシミュレーターでは回転数毎に性能曲線、サージ、ストーンウォールポイントの入力が可能となっており、入力されていない回転数のデータは内挿されます。
あるいは複数回転数の入力ができない場合は、以下のAffinity Lawに従って変化するようになっているケースが多いかと思います。(指数項は設定変更が可能なケースが多いかと思います)
$$Q_2 = Q_1 * \frac{N_2}{_1} $$ $$H_2 = H_1 * (\frac{N_2}{_1})^2 $$ $$P_2 = P_1 * (\frac{N_2}{_1})^3 $$※ここで、PはPowerを示します。
無次元化性能曲線コンプレッサーメーカーから提示される性能曲線データは、特定のガス、温度、圧力、流量条件下でテストされたデータになります。
実流体とテスト流体が異なる場合は、ガス性状、運転条件に応じて性能曲線を変換する必要があります。
通常シミュレーターにはガスの分子量や吸い込み条件に応じて換算する機能が搭載されています。AVEVA社のDYNSIMでは、実用的なアンチサージコントローラーモデルにおいて無次元化性能曲線を用いています。
無次元化性能曲線の詳細については、こちらの本が参考になります。
GPSA法
GPSA法のヘッド計算
まとめると、GPSA法でのヘッド計算は以下の式で求められます。
$$\Delta H=\left[\frac{z_{av}\cdot R\cdot T_s}{\frac{k-1}{k}}\right]\left[\left(\frac{P_d}{P_s}\right)^\left(\frac{k-1}{k}\right)-1\right]$$ $$k=Cp/Cv$$ここで、\(Z_{av}=(Z_s+Z_d)/2\)。
例えば、Cp/Cv=1.4、Zs=0.95、Zd=0.93、Ts=-150C、Ps=200kPa、Pd=400kPaとすると、
$$\Delta H=\left[\frac{0.94 \cdot 8.314\cdot 120}{\frac{1.4-1}{1.4}}\right]\left[\left(\frac{400}{200}\right)^\left(\frac{1.4-1}{1.4}\right)-1\right]$$
$$\Delta H=1048[kJ/kg-mol]$$
Polytropic Headの計算(ASME PTC10)
Polytropic Headの計算(ASME PTC10)
コンプレッサーの行う仕事量は、始点と終点の状態だけではなく、経路によって変化します。
Schultzの方法(1962)では、Polytropic指数によって変化する経路の違いが、仕事量の予測精度に重要な影響があると考え、補正項fsを導入しています。以下の手順でPolytropicヘッドを求めます。
isentropic Exponentを求めます。
$$n_is=\frac{ln\frac{P_d}{P_s}}{ln\frac{v_s}{v_{di}}}$$Shultz Polytropic Head Correction Factorを求めます。
$$f=\frac{h_di-h_s}{\left(\frac{n_{is}}{n_{is}-1}\right) \cdot \left(P_d v_{di}-P_s V_s\right)}$$等エントロピーヘッドを求めます。
Recipro compressor
Recipro compressorのHead計算
。
アンチサージコントローラー
アンチサージラインと運転点の計算
近年、サージラインに数秒入ることを許容するケースもあるようで、サージラインを超えた領域における挙動をモデリングしたいという要望を聞くこともあります。
サージラインを跨いで性能曲線はS字を描くと言われていますが、通常のプロセスシミュレーターでは、残念ながらサージ領域における性能曲線入力まではできません。通常はサージ領域に入らないようにアンチサージコントロール、サージラインのサイジング検討を行います。
AVEVA社のDYNSIMではより実用的なアンチサージコントローラーが搭載されています。
以下簡単な考え方をご説明します。
サージ回避の手法については、Vijayさんの記事が素晴らしいのでご参照ください。
また、こちらのサージ感度解析ツールも素晴らしいです。
当サイトに不具合、ご意見等ございましたらCEsolutionにお知らせください。